Учебный курс AVR. Использования TWI модуля как ведущего I2C устройства. Работа на прерываниях. Ч5
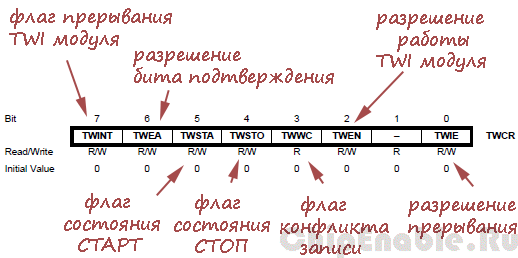
 Все операции, выполняемые TWI модулем, завершаются установкой бита прерывания (TWINT бит регистра TWCR) и соответствующего статусного кода (старшие шесть разрядов регистра TWSR). Это позволяет организовать обмен данными по шине с помощью прерываний.
Все операции, выполняемые TWI модулем, завершаются установкой бита прерывания (TWINT бит регистра TWCR) и соответствующего статусного кода (старшие шесть разрядов регистра TWSR). Это позволяет организовать обмен данными по шине с помощью прерываний.
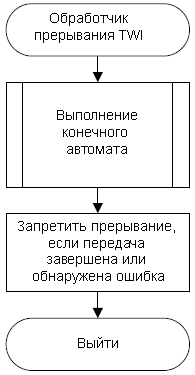
Суть подхода в следующем. Мы формируем сообщение для передачи, затем инициируем ее старт и разрешаем прерывания. Дальнейшую работу выполняет автоматически вызываемый обработчик прерывания TWI модуля, а микроконтроллер может заниматься другими задачами.
Такой подход экономит время микроконтроллера, потому что не нужно опрашивать в цикле бит прерывания, чтобы продолжить процесс обмена данными.
В этой части мы рассмотрим работу ведущего TWI устройства на прерываниях. Код для этого материала основан на руководстве фирмы Atmel - AVR315: Using TWI module as I2C master.
Учебный курс AVR. Использования TWI модуля. Работа с DS1307. Статусные коды. Ч4
В составе TWI модуля микроконтроллеров AVR есть регистр TWSR. Старшие 6 разрядов этого регистра содержат статусный код, а младшие - управляющие разряды, которые задают коэффициент деления частоты SCL сигнала. Я сейчас говорю про atmega16, в некоторых микроконтроллерах этих разрядов нет, но не суть.
Статусный код отражает результат последней выполненной операции TWI модуля. По нему можно судить, завершилась ли она успешно или что-то пошло не так, стоит ли продолжать передачу данных или ее пора прекращать.
В предыдущей части был рассмотрен топорный вариант работы с DS1307, в котором статусные коды TWI модуля просто игнорировались. В этом материале разобран пример работы с TWI модулем без прерываний, но с использованием статусных кодов.
Учебный курс AVR. Использования TWI модуля. Работа с DS1307. Дешево и сердито. Ч3
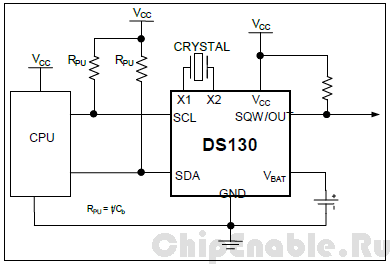
В этом материале будет рассмотрен топорный вариант работы с TWI модулем на примере часов реального времени - микросхемы DS1307. Топорный, потому что обмен по I2C будет организован без прерываний и анализа статусных кодов, чтобы сильно не грузить начинающих.
Учебный курс AVR. Использования TWI модуля. Регистры. Ч2
Для того чтобы дальше разбираться с TWI модулем, нужно ознакомиться с его регистрами, и сейчас нам придется проделать эту нудную работу. Разбор регистров будет вестись на примере микроконтроллера atmega16. В других микроконтроллерах возможны небольшие отличия.
Учебный курс AVR. Использования TWI модуля. Основы I2C. Ч1
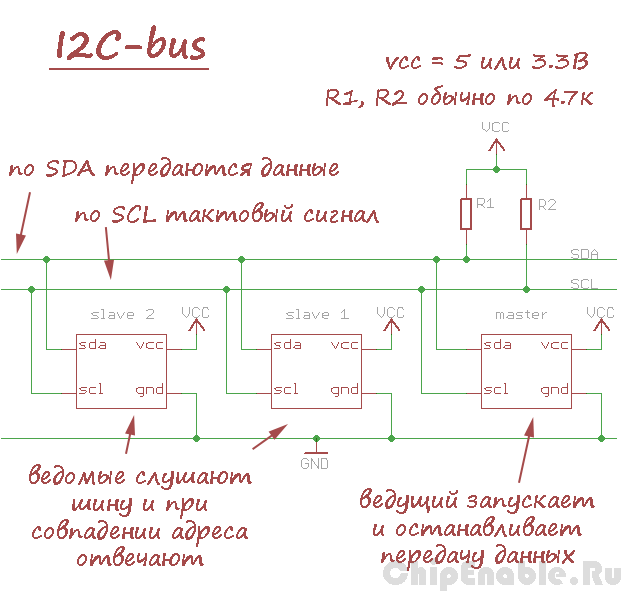
В составе некоторых микроконтроллеров AVR есть модуль двухпроводного последовательного интерфейса (Two -wire Serial Interface или TWI). Модуль предназначен для организации обмена данными между микросхемами, подключенными к двухпроводной шине. Основное преимущество этого интерфейса перед SPI и UART`ом - это возможность организации сети из нескольких устройств.
Двухпроводный интерфейс является аналогом I2C интерфейса фирмы Philips, только в случае AVR, не поддерживает высокие скорости передачи данных (свыше 400 kbit/s). Соображения, по которым Atmel использует другое названия, видимо связано с нежеланием платить Philips за лицензию.
В этом материале мы разберемся с основами двухпроводного последовательного интерфейса, а в следующих перейдем к работе с TWI модулем AVR.
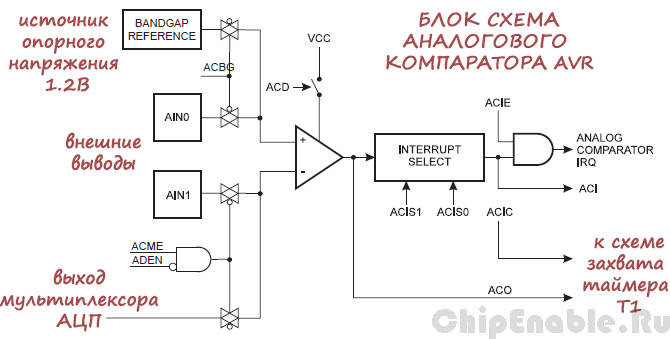
Учебный курс AVR. Аналоговый компаратор
Один из самых простых модулей микроконтроллеров AVR - это аналоговый компаратор. Он сравнивает между собой два напряжения и запоминает результат сравнения в регистре. Также он может вызывать прерывания, если результат сравнения изменился, и управлять схемой захвата таймера Т1 (конечно если он есть).
Обычно аналоговый компаратор используется как однобитный АЦП. Например, компаратором можно отслеживать уровень заряда батареи или момент перехода переменного напряжения через ноль. Еще он может быть задействован для измерения длительности аналоговых сигналов и в ряде извращений нестандартных решений. Таких как многоразрядный АЦП последовательного приближения.
В этой статье мы разберемся, как пользоваться аналоговым компаратором на примере atmega16.
Учебный курс AVR. Таймер - счетчик Т0. Режим CTC. Ч2

Следующий режим работы таймера Т0 - это режим CTC (Clear Timer on Compare) или "сброс при совпадении". Таймер в этом режиме работает следующим образом.
При инициализации таймера мы очищаем счетный регистр TCNT0, а в регистр сравнения OCR0 загружаем число. Затем устанавливаем режим СТС и требуемый коэффициент предделителя.
Таймер начинает работу. По каждому импульсу тактового сигнала счетный регистр увеличивает свое значение на единицу. Когда значение счетного регистра совпадет с регистром сравнения, установится флаг OCF0, счетный регистр сбросится и счет продолжится с нуля.
Учебный курс AVR. Таймер - счетчик Т0. Режим Normal. Ч2
По сути, таймер микроконтроллера - это цифровой счетчик, только "навороченый". На вход счетчика подается тактовый сигнал, по каждому импульсу которого счетчик увеличивает свое значение. При возникновении событий - переполнение счетчика или совпадение его значения с заданным - генерируется запрос на прерывание.
Давайте разберем, как пользоваться таймером Т0 в режиме Normal. В этом режиме таймер считает от какого-то начального значения счетного регистра до максимально возможного (до 255 или 0xFF). Когда таймер Т0 досчитывает до максимума, то в следующий такт таймера возникает переполнение счетного регистра TCNT0 - он обнуляется и устанавливается флаг TOV0. Если в программе разрешены прерывания глобально (флаг I регистра SREG) и прерывание таймера Т0 по переполнению (флаг TOIE0 регистра TIMSK), то микроконтроллер вызовет соответствующий обработчик. Если значение счетного регистра совпадет с регистром сравнения OCR0, то установится флаг OCF0 и при разрешенном прерывании по событию совпадение, запустится его обработчик.

Учебный курс AVR. Таймер - счетчик Т0. Регистры. Ч1
Таймер-счетчик является одним из самых ходовых ресурсов AVR микроконтроллера. Его основное назначение - отсчитывать заданные временные интервалы. Кроме того, таймеры-счетчики могут выполнять ряд дополнительных функций, как то - формирование ШИМ сигналов, подсчет длительности и количества входящих импульсов. Для этого существуют специальные режимы работы таймера-счетчика.
В зависимости от модели микроконтроллера количество таймеров и набор их функций может отличаться. Например, у микроконтроллера Atmega16 три таймера-счетчика - два 8-ми разрядных таймера-счетчика Т0 и Т2, и один 16-ти разрядный - Т1. В этой статье, на примере ATmega16, мы разберем как использовать таймер-счетчик Т0.
Учебный курс AVR. Проблемы при работе с EEPROM. Повышение надежности EEPROM. Ч3
В этом материале мы рассмотрим возможные проблемы при работе с EEPROM. Часть из них связана с аппаратным стороной микроконтроллера, такие как повреждение EEPROM при пониженном напряжении питания и ограниченный ресурс EEPROM, а часть с программным обеспечением, например, при использовании EEPROM в прерываниях. Также рассмотрим способы решения этих проблем и методы повышения надежности хранения данных в EEPROM.